

目录
快速导航-
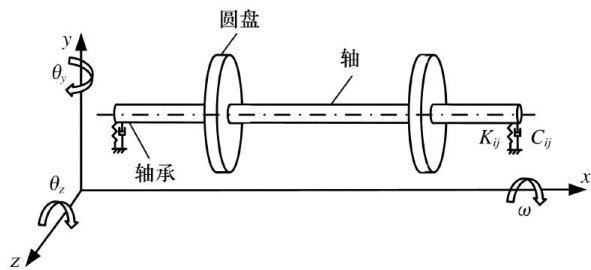
机械基础工程 | 基于多维复向特征融合与CNN-GRU的转子不平衡量识别方法
机械基础工程 | 基于多维复向特征融合与CNN-GRU的转子不平衡量识别方法
-

机械基础工程 | 航空燃油管路焊缝分区域建模及其对管路力学特性影响研究
机械基础工程 | 航空燃油管路焊缝分区域建模及其对管路力学特性影响研究
-
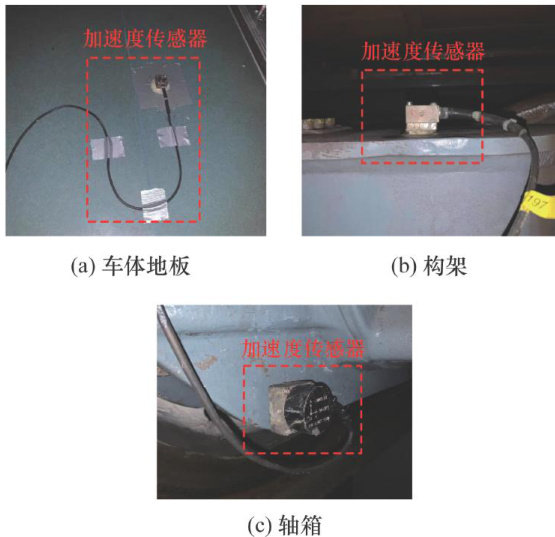
机械基础工程 | 针对地铁车辆晃动的轨道几何不平顺敏感波长分析
机械基础工程 | 针对地铁车辆晃动的轨道几何不平顺敏感波长分析
-
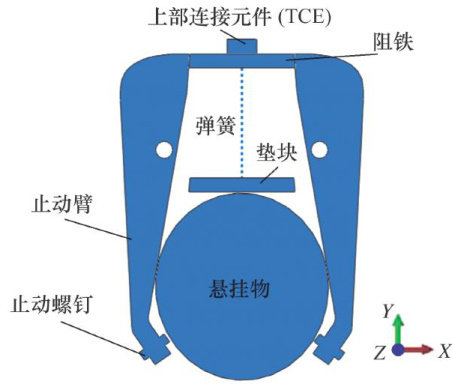
机械基础工程 | 基于内聚力模型的某型挂钩悬挂失效分析
机械基础工程 | 基于内聚力模型的某型挂钩悬挂失效分析
-

机械基础工程 | 基于CPU-GPU的超音速流场N-S方程数值模拟
机械基础工程 | 基于CPU-GPU的超音速流场N-S方程数值模拟
-
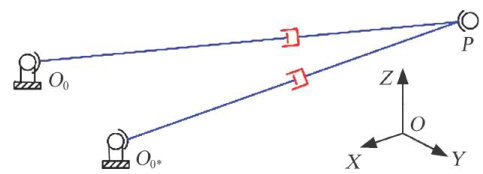
机械基础工程 | 一种运动可解耦的Stewart型并联机构的正运动学及奇异性
机械基础工程 | 一种运动可解耦的Stewart型并联机构的正运动学及奇异性
-
机械基础工程 | 基于电液类比原理的水导激光水压脉动衰减器滤波特性
机械基础工程 | 基于电液类比原理的水导激光水压脉动衰减器滤波特性
-

机械基础工程 | 磁流变液环境下密封副非线性磨损行为研究
机械基础工程 | 磁流变液环境下密封副非线性磨损行为研究
-
机械基础工程 | 高刚度空间套筒展开机构级间锁紧技术研究
机械基础工程 | 高刚度空间套筒展开机构级间锁紧技术研究
-
机械基础工程 | Si3N4 耐高温全陶瓷向心关节轴承磨损性能研究
机械基础工程 | Si3N4 耐高温全陶瓷向心关节轴承磨损性能研究
-

机械基础工程 | 黏土环境下六足机器人抬腿阻滞力学模型研究
机械基础工程 | 黏土环境下六足机器人抬腿阻滞力学模型研究
-
机械基础工程 | 基于Paris模型的滚动轴承全周期疲劳寿命预测
机械基础工程 | 基于Paris模型的滚动轴承全周期疲劳寿命预测
-

智能制造 | 深孔零件轴线直线度误差的在线测量与评定技术研究
智能制造 | 深孔零件轴线直线度误差的在线测量与评定技术研究
-
智能制造 | 基于共振解调新方法的滚动轴承故障诊断
智能制造 | 基于共振解调新方法的滚动轴承故障诊断
-

智能制造 | 基于贝叶斯优化多尺度DenseNet的离心泵声信号故障诊断方法
智能制造 | 基于贝叶斯优化多尺度DenseNet的离心泵声信号故障诊断方法
-
智能制造 | 快速单曝光高动态范围高反光金属表面缺陷辨识算法研究
智能制造 | 快速单曝光高动态范围高反光金属表面缺陷辨识算法研究
-

智能制造 | 基于改进樽海鞘群算法的机械臂多目标轨迹规划研究
智能制造 | 基于改进樽海鞘群算法的机械臂多目标轨迹规划研究
-
智能制造 | 以热图像为输人的基于ResNet的机床主轴热误差建模方法
智能制造 | 以热图像为输人的基于ResNet的机床主轴热误差建模方法
-
增材制造 | 面向高端装备的金属激光增材制造技术发展与应用
增材制造 | 面向高端装备的金属激光增材制造技术发展与应用
-

增材制造 | FDM全彩色3D打印机颜色匹配标定算法研究
增材制造 | FDM全彩色3D打印机颜色匹配标定算法研究
-
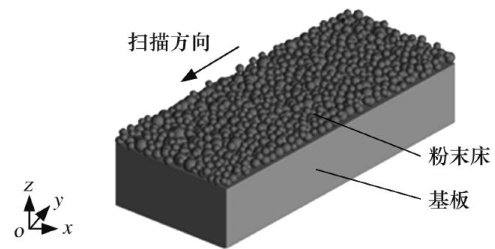
增材制造 | 基于多尺度模拟的选区激光熔化金属件疲劳性能预测
增材制造 | 基于多尺度模拟的选区激光熔化金属件疲劳性能预测
-

服务型制造 | 基于R-GRA的云制造协同服务主体评价研究
服务型制造 | 基于R-GRA的云制造协同服务主体评价研究
-
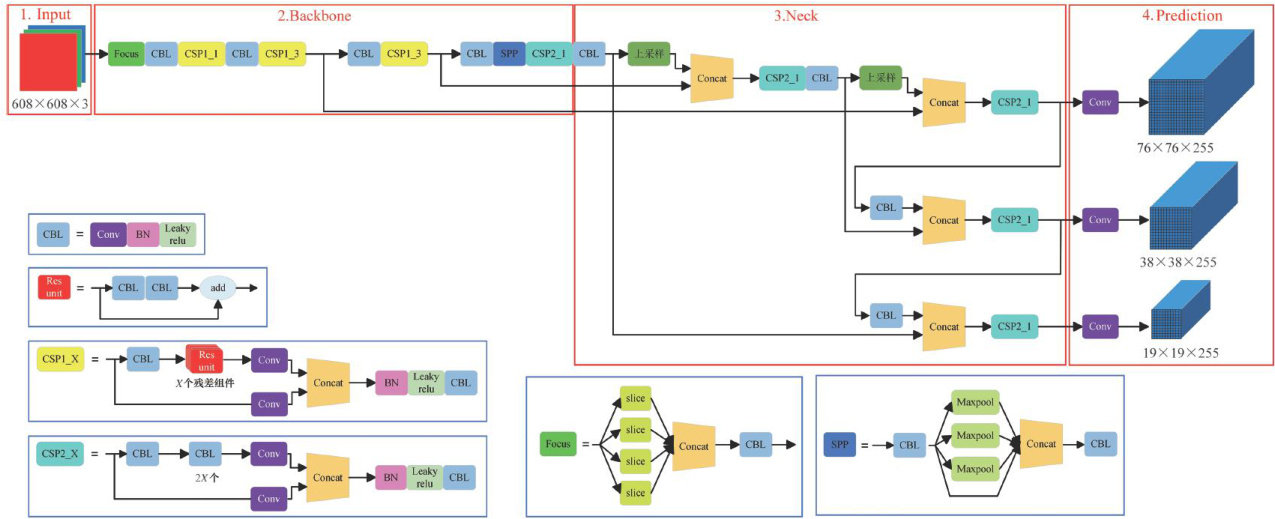
服务型制造 | 基于改进YOLOv5s的风电叶片表面缺陷检测方法
服务型制造 | 基于改进YOLOv5s的风电叶片表面缺陷检测方法
-

工程前沿 | 自锁状态下钳剪抓一体属具接触性能研究
工程前沿 | 自锁状态下钳剪抓一体属具接触性能研究
-

工程前沿 | 移动载荷作用下输电线路的动力响应分析
工程前沿 | 移动载荷作用下输电线路的动力响应分析
-

工程前沿 | 新型可变形串联管道检测机器人:设计、建模及实验
工程前沿 | 新型可变形串联管道检测机器人:设计、建模及实验
-
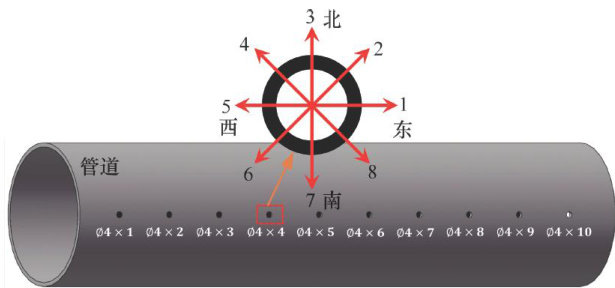
工程前沿 | 基于ResGNNet多模态融合的油气管道缺陷等级磁记忆定量识别
工程前沿 | 基于ResGNNet多模态融合的油气管道缺陷等级磁记忆定量识别








 登录
登录